tags : Computer Memory, Memory Design
Two types, volatile and non-volatile. This document mostly contains info about semiconductor memory, but non-volatile memory which are not based on solid-state IC technology are also out there. Such as:
- CD-ROM which is read-only (analogous to masked ROM).
- CD-R is Write Once Read Many (analogous to PROM)
- CD-RW supports erase-rewrite cycles (analogous to EEPROM)
Non Volatile
These are used to store firmware programs(BIOS, network card firmware, I/O device controllers which can store instructions and data etc.), SSDs.
ROM
- read-only memory / We’re mostly talking about Mask ROM here.
- Mask ROM, the contents are programmed by the ic manufacturer and almost impossible to change.
- The one-time masking cost is high and there is a long turn-around time from design to product phase.
PROM
- programmable read-only memory
- FPGA sprouted out from here.
EPROM
- Erasable programmable read-only memory
- Need to be completely erased before being rewritten.
EEPROM
- Electrically erasable programmable read-only memory
- Can be erased, written and read in blocks (or pages) which are generally much smaller than the entire device.
- Flash Memory was invented based on EEPROM in 1980.
- This is the pre-cursor to NAND, which is used for USB drives and SSDs nowadays.
NVRAM
- Non-volatile random-access memory (NVRAM) is random-access memory that retains data without applied power.
Volatile
These are basically RAMs;
- Traditionally packaged as a
chipor sometimes embedded as part of processor chip - Basic storage unit is normally a
cell(one bit per cell). - Multiple RAM
chipsform a memory.
DRAM
Dynamic random-access memory (DRAM) is a type of random access semiconductor memory that stores each bit of data in a memory cell consisting of a tiny capacitor and a transistor, both typically based on metal-oxide-semiconductor (MOS) technology.
SDRAM
Synchronous dynamic random-access memory (SDRAM) is any dynamic random-access memory (DRAM) where the operation of its external pin interface is coordinated by an externally supplied clock signal.
DDR
Double Data Rate SDRAM. It has DDR{1...4}
GDDR
GDDR is a type of SDRAM specifically designed for graphics processing units (GPUs). It has GDDR{1...6}
HBM
High Bandwidth Memory (HBM) is a high-performance RAM interface for 3D-stacked SDRAM. Is this supposed to be some kind of breakthrough? idk, have to read more on this one.
SRAM
- The term static differentiates SRAM from DRAM which must be periodically refreshed(some voltage constantly needs to keep hitting the DRAM, otherwise it loses its charge!).
- SRAM is faster and more expensive than DRAM
- Requires more transistors than DRAM.
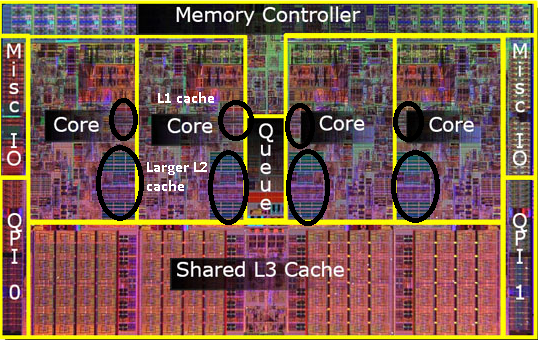
- It is typically used for CPU cache while DRAM is used for a computer’s main memory.
- More about cache lines
HDDs
Data are r/w in units of
sector
In disks(HDDs), access time is dominated by seektime and rotational latency, i.e first bit in a sector is expensive, the rest are free.
Taccess = Tavg seek + Tavg rotation + Tavg transfer
Taccess = 9 ms + 4 ms + 0.02 ms // taking average practical numbers.But modern disks give us a more useful/simpler abstraction to the (cylinder/surface/track/sector) gemeotry. It presents the disk to the cpu as a sequence of logical blocks, where each block is a multiple of a sector size. The mapping between logical blocks and physical sectors are maintained by firmware device called disk controller
Rotational Latency: Time waiting for the first bit of target sector to pass under r/w head. Delay waiting for the rotation of the disk to bring the required(eg. requested by cpu) disk sector under the r/w head is the Seek time.
SSDs
Data are r/w in units of
page
IMPORTANT NOTE
- Don’t confuse the terms of block, sector, page
- Block means something else for filesystem, and something else in SSD architecture
- Page is Virtual Memory thing, page in SSD architecture is different
- Similarly, sector is a term related to Block device, which is not used w SSDs but used in HDD architecture.
Carefully understand the context of the term. They are not the same.
~3.2GB/sis coming close to the upper bounds of a typical solid state drive- SSDs have something called the
flash translation layerwhich serves the same purpose as thedisk controllerin HDDs. - Instead of
(surface/track/sector), SSDs useblocks/pages(pageslive insideblocks); these are different from the virtual memory pages.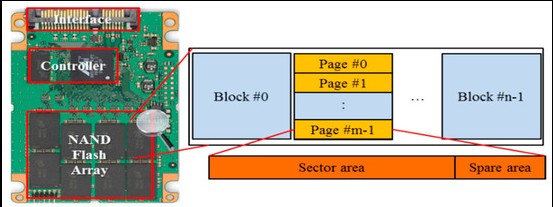
- Interestingly
pagescan only be written once itsblockhas been erased; This makeswritesin SSDs pretty complicated.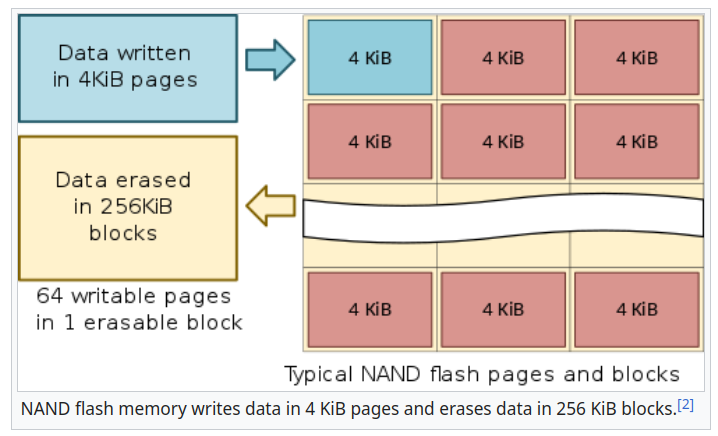
- We can do small writes on ssds but small writes on SSDs can kill them aswell. So it’s good idea to batch things in memory before writing to ssd. (See Write Amplification)
Seq. accessfaster thanrandom access.- Random
writesare slower due to the reason mentioned above. Earlier ther/waccess gaps were much larger, today we don’t need to really worry about it that much. They are almost the same due to optimizations.
What happened in 2003?
Till 2003, clock frequency and cpu cycle time basically increased exponentially every 18months; but the power you consume is proportional to the clock frequency; so you’ll need a LOT (800W!!) to keep increasing clock freq, this is when we said “processor freq. hit the powerwall”, so manufacturers started putting multiple cores.
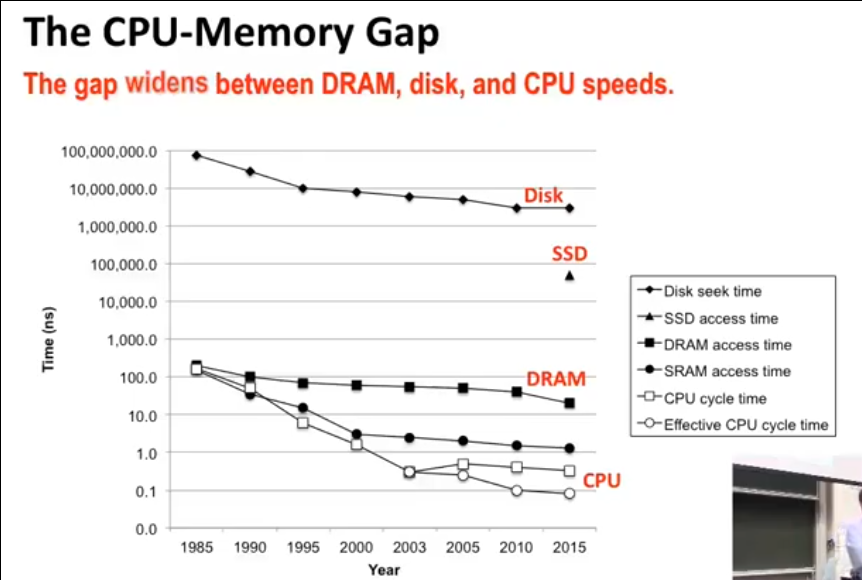
Effective cycle time = cycletime/no. of cores.
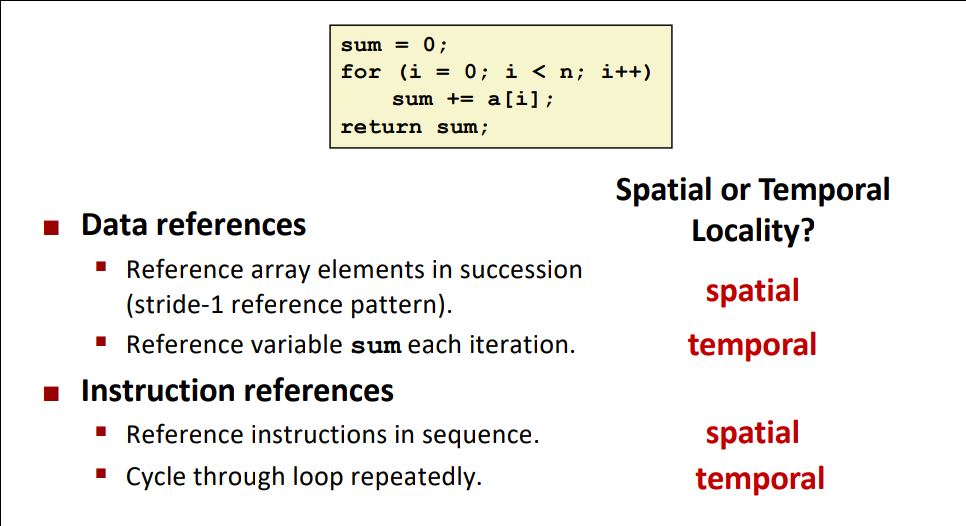
Locality
Programs tend to use data and instructions with addresses near or equal to those they have used recently. Two types, Temporal and Spatial. There are various access patterns based on this principle of locality. These not only refer to data but also to the instructions that get loaded into the CPU. As software developers we should have a good qualitative sense of locality; determine if a piece of code has good locality.
Caches work because of the idea of memory hierarchy and locality.
// This has BAD spatial locality!
// c stores arrays in row major order.
static char array[800][1000];
int main (void)
{
int i, j;
for (j = 0; j < 1000; j++)
for (i = 0; i < 800; i++)
array[i][j]++;
// for NxN arrays, just swapping the indexes do the same thing
// as changing the order of the `for` loops.
return 0;
}// This has GOOD spatial locality!
static char array[800][1000];
int main (void)
{
int i, j;
for (i = 0; i < 800; i++)
for (j = 0; j < 1000; j++)
array[i][j]++;
return 0;
}Output:
// for the bad locality
λ perf stat --repeat 100 -e cycles:u -e instructions:u -e L1-dcache-loads:u -e L1-dcache-load-misses:u ./a.out
Performance counter stats for './a.out' (100 runs):
7,295,033 cycles:u ( +- 0.25% )
18,529,344 instructions:u # 2.54 insn per cycle ( +- 0.00% )
5,632,207 L1-dcache-loads ( +- 0.00% )
833,339 L1-dcache-load-misses # 14.80% of all L1-dcache hits ( +- 0.58% )
0.003322 +- 0.000167 seconds time elapsed ( +- 5.03% )// for the good locality
λ perf stat --repeat 100 -e cycles:u -e instructions:u -e L1-dcache-loads:u -e L1-dcache-load-misses:u ./a.out
Performance counter stats for './a.out' (100 runs):
6,682,657 cycles:u ( +- 0.14% )
18,527,945 instructions:u # 2.77 insn per cycle ( +- 0.00% )
5,631,837 L1-dcache-loads ( +- 0.00% )
2,300 L1-dcache-load-misses # 0.04% of all L1-dcache hits ( +- 1.06% )
0.003421 +- 0.000215 seconds time elapsed ( +- 6.30% )- Stride of an array : The stride determines the distance between two elements, which will be greater than or equal to the
sizeof the element. Sometimes sequential access is also calledstride-1 pattern=/=stride-unit pattern.
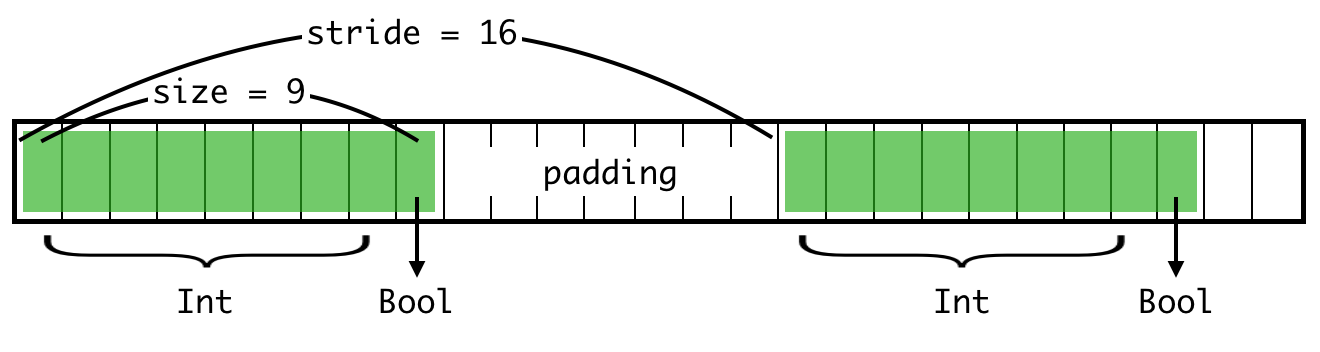
[a,b,c,d] // say elements are `int64`; here stride is 4bytes if there is no padding.
[a,b,c,d] // say elements are some `struct`; here stride is size of the structs; having padding will change the stride.